Neben vielen anderen Branchen steigt auch im Rennsport der Bedarf an Informatikern. Auch das Formula Student Team der technischen Hochschule Würzburg-Schweinfurt arbeitet seit nunmehr zwei Jahren mit Hochdruck an einem autonomen System für ihre Rennboliden.
Ziel des Projekts ist es, das Fahrzeug so schnell wie möglich fahrerlos durch verschiedene (zum Teil unvorhersehbare) Kurse fahren zu lassen. Hierbei muss sowohl Software für die Ansteuerung verschiedener Aktorik und das Einlesen und Ausgeben von Sensorwerten als auch für die Erkennung des Fahrbahnrandes und der Planung der Strecke in Echtzeit entwickelt werden. Diese wurde in einem speziellen Simulator getestet und anschließend im Fahrzeug validiert. Dafür hatte das Team ein Altfahrzeug mit der finanziellen Unterstützung des IWInet umgebaut. Neben den im letzten Artikel bereits erwähnten Komponenten, sponsorte der Alumniverein der Fakultät Informatik und Wirtschaftsinformatik noch einen DC-Motor inklusive Steuerung, der es ermöglichte die Lenkung mithilfe einer speziellen Software anzusteuern. Bereits mit der ersten Softwareversion für das Fahrzeug gelang es dem Team zum ersten Mal in der Vereinsgeschichte ein Auto selbständig fahren zu lassen. In den kommenden Wochen konnte das Team die Performance der Software verbessern und Abweichungen zwischen Simulator und Realität identifizieren. Dabei konnten Geschwindigkeiten von bis zu 70 km/h ohne Probleme erzielt werden.
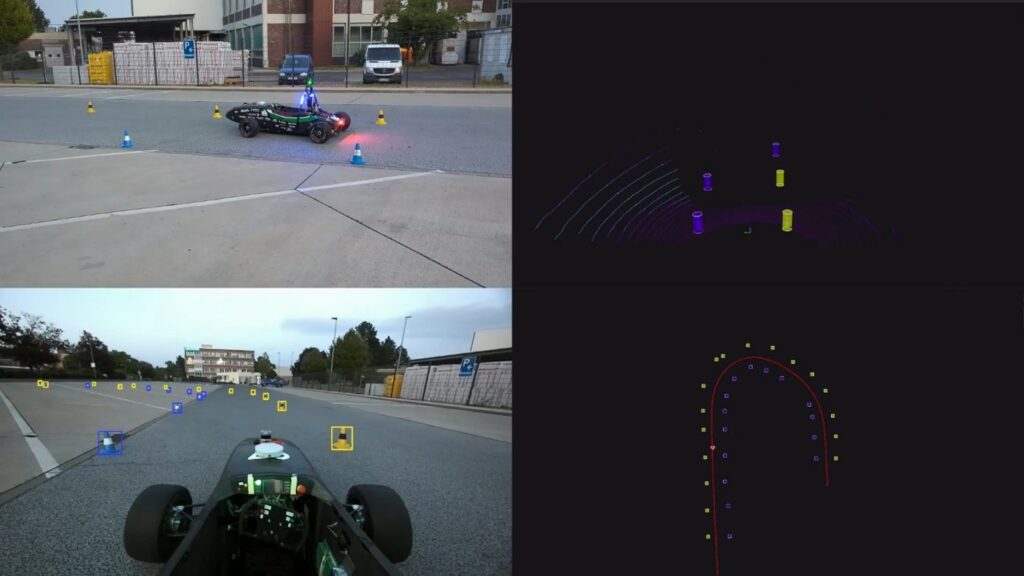
Mit dem neusten Fahrzeug des Vereins, dem MF15, sollte das erste Fahrzeug gebaut werden, in dem das autonome System bereits in der Entwicklungsphase Bestandteil des Konzepts ist. Dabei wurde bei der Erkennung der Fahrbahnbegrenzung auf eine Kombination zwischen einem LiDAR auf der Nase und einer Stereokamera über dem Fahrerkopf gesetzt. Anhand dieser Daten wird mithilfe der selbstentwickelten Software eine Karte inklusive eines Pfads für das Fahrzeug generiert.